

2月26日,上海微电机研究所(中国电子科技集团公司第二十一研究所)公布“一种基于差动机构的机器人腿部和四足机器人”的专利,该专利于2020年12月15日,申请公布号为CN112407096A。
四足机器人近几年逐渐成为国内外学者研究的热点,目前的四足机器人腿部机构驱动主要是通过关节直驱方式,该方法控制系统较为简单可靠,但是膝关节电机成为髋关节电机的负载,整体结构冗余累赘。因而,在四足机器人腿部机构设计中,要设计所需驱动电机输出力矩最小化的腿部机构是难点所在。
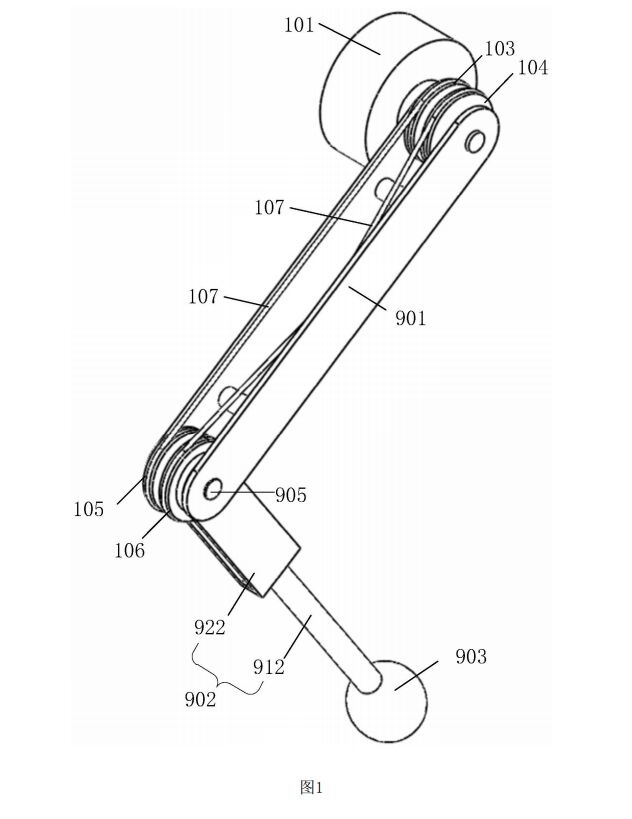
根据专利摘要,本申请提供了一种基于差动机构的机器人腿部和四足机器人。该机器人腿部中,第一驱动轮与第二驱动轮并列设置,第一驱动轮与髋关节转轴转动连接,第二驱动轮安装于髋关节转轴上,其中,髋关节转轴转动安装于腿部的髋关节处;第一从动轮与第二从动轮并列设置,且均通过膝关节转轴转动安装于腿部的膝关节处;第一从动轮与腿部的大腿固定连接,第二从动轮与腿部的小腿固定连接;第一驱动单元和第二驱动单元均安装于大腿上,第一驱动单元能够通过第一驱动轮带动第一从动轮转动,以驱动大腿绕髋关节转轴摆动;第二驱动单元能够通过第二驱动轮带动第二从动轮转动,以驱动小腿绕膝关节转轴摆动,且小腿的摆动方向与大腿的摆动方向相反。
品牌、内容合作请点这里:寻求合作 ››


想看更多前瞻的文章?扫描右侧二维码,还可以获得以下福利:

下载APP

关注微信号





扫一扫下载APP
与资深行业研究员/经济学家互动交流让您成为更懂趋势的人
违法和不良信息举报电话:400-068-7188 举报邮箱:service@qianzhan.com 在线反馈/投诉 中国互联网联合辟谣平台
Copyright © 1998-2026 深圳前瞻资讯股份有限公司 All rights reserved. 粤ICP备11021828号-2 增值电信业务经营许可证:粤B2-20130734


