

2月5日,小鹏汽车旗下广州小鹏自动驾驶科技有限公司公开“一种基于超声波雷达的探测方法、装置和车辆”专利,该专利于2020年11月4日申请,申请公布号为CN112327307A。
根据该专利背景技术,具备自动驾驶功能的车辆中,通常设置有超声波雷达,通过超声波雷达对行驶行驶环境的检测,例如进行车位边缘信息的检测,从而基于车位边缘信息虚拟生成车位的车位信息,从而可以基于车位信息生成泊车路径进行泊车。
在泊车过程中会持续采用超声波雷达进行车位边缘信息检测,从而调整泊车路径,但是由于在车辆进入车位(入库)过程中,超声波雷达的探测缺乏方向性,其默认探测点位置的位置为正对着超声波雷达的方向,由于一般入库的情况下,车辆需要不断调整角度和位置以驶入车位,因此车辆与车位之间的夹角总是在不断变化,超声波雷达的真实探测回波可能是来自不同角度的放射波,如果默认为正对着超声波雷达的方向的回波为探测点位置,则会导致超声波雷达检测障碍物的边缘出现较大的误差,造成虚拟车位形状与实际车位形状不符,从而影响泊车路径的生成,可能会使得车辆最终泊车位置靠近于车位一侧或直接泊车中止。在超声波雷达的探测点位置的位置误差较大时,影响了障碍物的探测结果,进而影响驾驶员的驾驶体验。
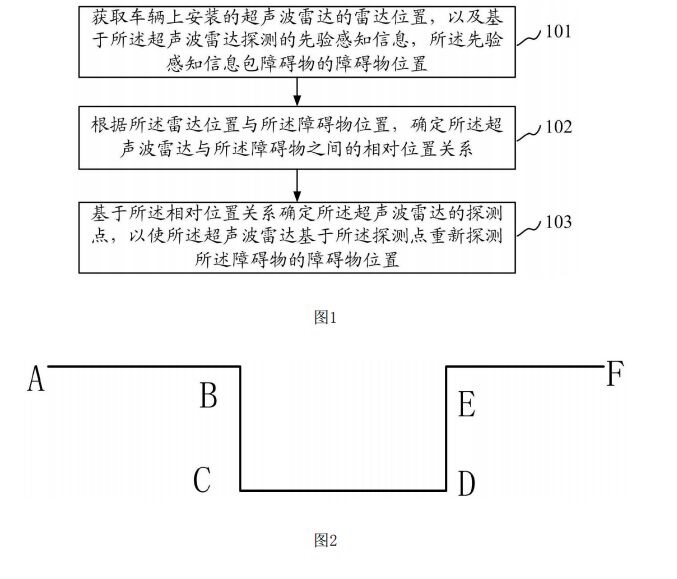
根据专利摘要,本发明实施例提供了一种基于超声波雷达的探测方法和车辆,所述方法包括:获取车辆上安装的超声波雷达的雷达位置,以及基于所述超声波雷达探测的先验感知信息,所述先验感知信息包括障碍物的障碍物位置;根据所述雷达位置与所述障碍物位置,确定所述超声波雷达与所述障碍物之间的相对位置关系;基于所述相对位置关系确定所述超声波雷达的探测点位置,以使所述超声波雷达基于所述探测点位置重新探测所述障碍物的障碍物位置。
在本发明实施例中,基于超声波雷达和障碍物之间的相对位置关系调整超声波雷达的探测点位置,从而基于调整后的探测点位置重新探测障碍物的障碍物位置,提高行车安全性,且提高了驾驶员的驾驶体验。
品牌、内容合作请点这里:寻求合作 ››


想看更多前瞻的文章?扫描右侧二维码,还可以获得以下福利:

下载APP

关注微信号




扫一扫下载APP
与资深行业研究员/经济学家互动交流让您成为更懂趋势的人
违法和不良信息举报电话:400-068-7188 举报邮箱:service@qianzhan.com 在线反馈/投诉 中国互联网联合辟谣平台
Copyright © 1998-2024 深圳前瞻资讯股份有限公司 All rights reserved. 粤ICP备11021828号-2 增值电信业务经营许可证:粤B2-20130734


