

按照理想状态,自动驾驶汽车比人类驾驶的汽车更安全。但现实中,自动驾驶汽车也可能会导致一场灾难,而人类司机却可以轻易避免。几年来,MIT和丰田研究所正在为一辆高度可靠的自动驾驶汽车设计一种新的架构。
确保自动驾驶汽车可靠的传统解决方案使用传感器监控器,直接接收传感器数据,这些监控器必须对传感器数据进行解释,并与主控制器进行比较。安全控制器,或联锁,监控环境,并在事故即将发生时进行大量的干预。
然而,在实践中,传统的联锁理论只能到此为止,往往无法进行干预或不必要的干预。在像自动驾驶汽车这样复杂的系统中,如何确保这种连锁反应的介入?
MIT和丰田研究所的项目采用了一种新方法,为自动驾驶汽车配备与主控制器一样复杂的感知和情境感知工具,通过经过认证的控制来做到这一点。认证控制是自动驾驶汽车的一种新架构,它提供了一个小型、可验证的可信基础的可能性,而不阻止使用复杂的机器学习算法进行感知和控制。
关键想法是抓住问题解决方案的高成本和检查该解决方案的低成本之间的典型差距。主控制器扮演求解者的角色,分析场景并确定合适的下一步,认证者扮演检查者的角色,确保所提出的步骤是安全的。
为了使这种检查成为可能,主控制器构造了一个证书,该证书捕获它对情况的分析以及建议的操作。主控制器因此被排除在受信任的基础之外:当它正常工作时,认证者认可它的命令;当它失败时,认证者将拒绝命令,一个更简单的控制器将使汽车安全停止。我们设计了一个架构来体现这个想法,并在模拟和赛车中展示了它。
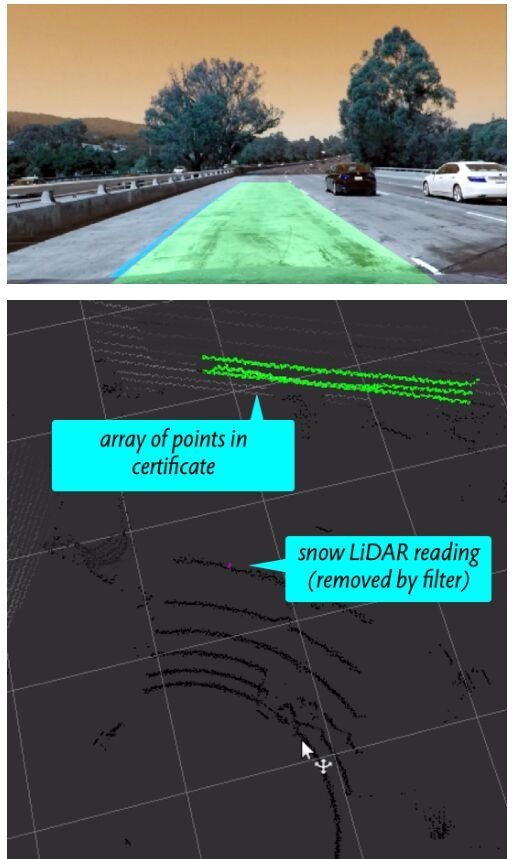
到目前为止,MIT已经探索了两个复杂解决的例子。第一种方法是通过视觉分析找到车道线。在这种情况下,证书包括一个签名的相机图像和一个数学规范的所谓的车道线。检查人员要确保车道线符合标准约定(即平行并保持正确的距离),并且它们与道路上的标记相匹配,就像摄像机图像中给出的那样。MIT已经在Open Pilot项目的样本视频上测试了这种方法,并表明能够捕捉车道检测产生不良结果的情况。
第二种方法是过滤激光雷达数据,以去除雪的虚假反射。主控制器应用一种离群点检测算法,从激光雷达云中移除与雪花相对应的点,并从剩下的点中选择一组覆盖前方车道的点,这些点的密度足够,以确保不会出现大于一定尺寸的障碍物。
这个项目由丰田公司提供部分资金。一项描述认证控制的专利在2019年11月26日提交。1月14日,这项专利被授予,专利号为US2021009114A1。
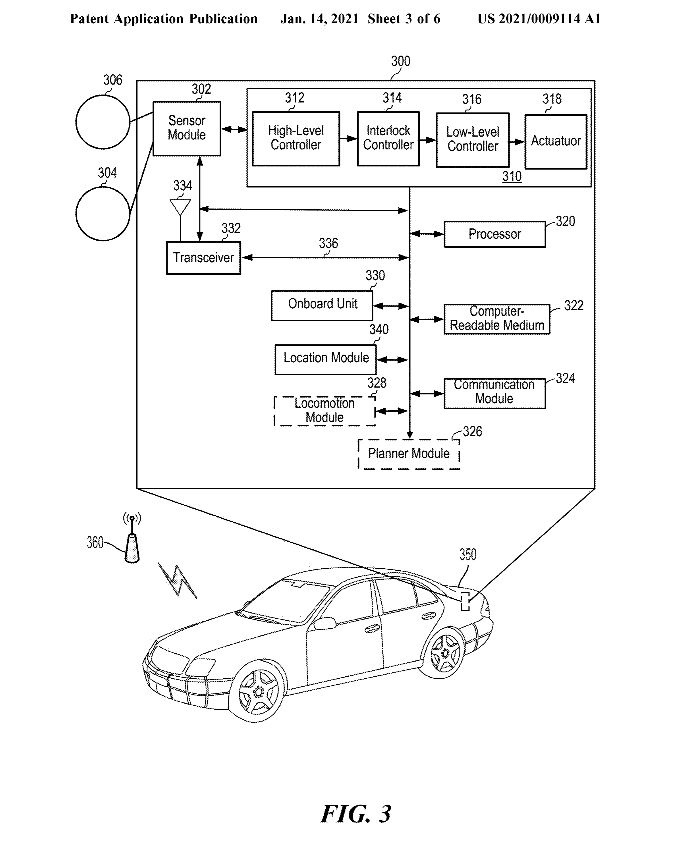
根据专利摘要,介绍了一种自动驾驶汽车认证控制方法:该方法包括分析自驾驶汽车的安全状况,利用自驾驶汽车的主控制器确定拟采取的车辆控制行动。该方法包括由主控制器向联锁控制器提供所提车辆控制动作,包括所提车辆控制动作的证明。该方法还包括由联锁控制器使用预定义的安全参数检查来自该证书的安全认证证据,从而达到验证效果。该方法还包括通过低级控制器指挥自动驾驶汽车执行经过认证的车辆控制动作。
下图展示了在车道跟踪(使用神经网络分析视觉数据)和障碍物分析(使用激光雷达过滤积雪)时所展示的认证的视觉版本。
品牌、内容合作请点这里:寻求合作 ››


想看更多前瞻的文章?扫描右侧二维码,还可以获得以下福利:

下载APP

关注微信号





扫一扫下载APP
与资深行业研究员/经济学家互动交流让您成为更懂趋势的人
违法和不良信息举报电话:400-068-7188 举报邮箱:service@qianzhan.com 在线反馈/投诉 中国互联网联合辟谣平台
Copyright © 1998-2025 深圳前瞻资讯股份有限公司 All rights reserved. 粤ICP备11021828号-2 增值电信业务经营许可证:粤B2-20130734


