
从天津大学官网获悉,该校科技工作者研发出了一种新型模块化柔性驱动方法并且可以用3D打印直接“打印”出柔性机器人。
软性机器人因其较高的柔性和对人体安全等优点,在近几年得到了持续广泛的关注。而3D打印的优势就是制造复杂形体、复杂结构而且不需要后续加工,可一次成型。
近日,天津大学左思洋、刘建彬课题组提出了一种基于薄膜气缸的新型模块化柔性驱动方法,并通过根据具体应用改变排列组合方式以及合理布置连接方案,将其应用于人工肌肉和管道爬行机器人中。
该方法基于一次3D打印成型的制造技术,省掉了传统机电设备加工制造中的装配流程,大幅降低了驱动模块的制造成本和周期,且具备耗气量小、动态响应高、可靠性高、对应用场景适应性强等特点。
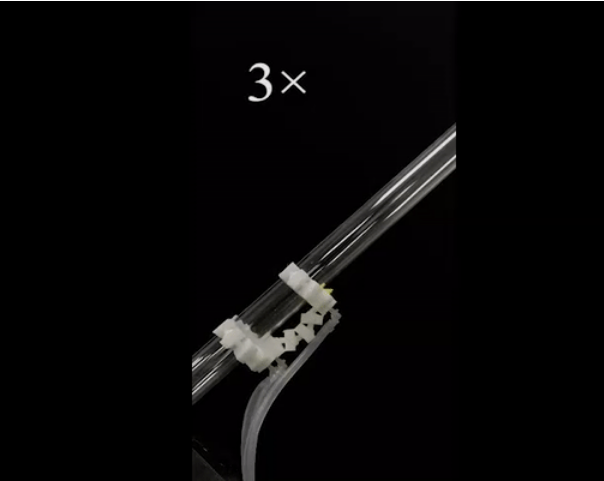
从发布的一小段视频来看,3D打印的柔性机器人像一只灵巧的尺蠖,牢牢地抓住圆形管,一伸一缩中蜿蜒前行。
该成果2021年1月初在线发表在《美国电气电子工程师学会机器人和自动化快报( IEEE Robotics and Automation Letters)》上。
品牌、内容合作请点这里:寻求合作 ››


想看更多前瞻的文章?扫描右侧二维码,还可以获得以下福利:

下载APP

关注微信号





扫一扫下载APP
与资深行业研究员/经济学家互动交流让您成为更懂趋势的人
违法和不良信息举报电话:400-068-7188 举报邮箱:service@qianzhan.com 在线反馈/投诉 中国互联网联合辟谣平台
Copyright © 1998-2025 深圳前瞻资讯股份有限公司 All rights reserved. 粤ICP备11021828号-2 增值电信业务经营许可证:粤B2-20130734


